Making the video stream intelligent
Let's add a yolov5 object detection operator that has already been written for us in ./operators/yolov5_op.py. This will help us detect object as bounding boxes within the webcam stream.
# operators/yolov5_op.py
"""
# Yolov5 operator
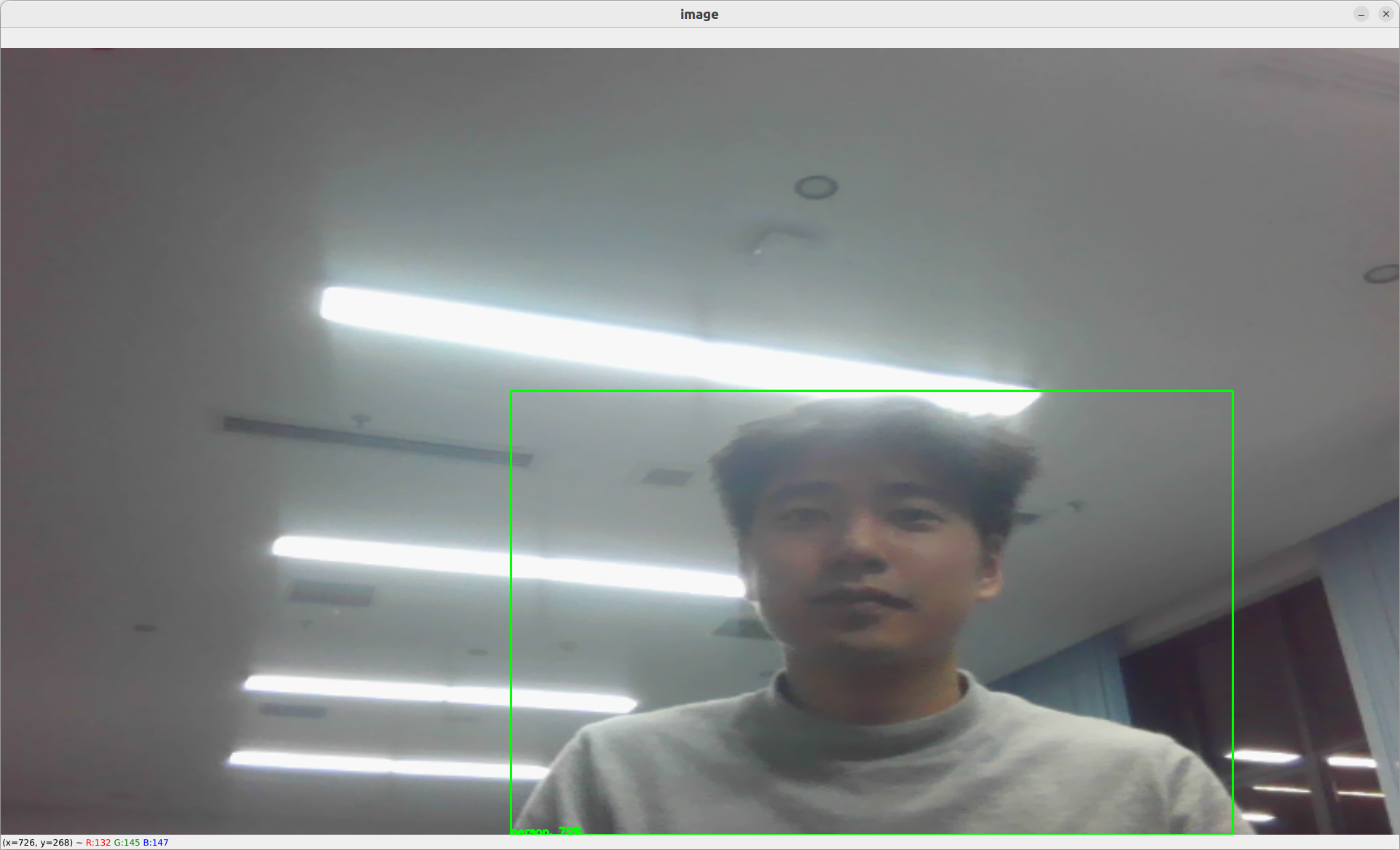
`Yolov5` object detection operator generates bounding boxes on images where it detects object.
More info here: [https://github.com/ultralytics/yolov5](https://github.com/ultralytics/yolov5)
`Yolov5` has not been finetuned on the simulation and is directly importing weight from Pytorch Hub.
In case you want to run `yolov5` without internet you can clone [https://github.com/ultralytics/yolov5](https://github.com/ultralytics/yolov5) and download the weights you want to use from [the release page](https://github.com/ultralytics/yolov5/releases/tag/v7.0) and then specify within the yaml graph the two environments variables:
- `YOLOV5_PATH: YOUR/PATH`
- `YOLOV5_WEIGHT_PATH: YOUR/WEIGHT/PATH`
You can also choose to allocate the model in GPU using the environment variable:
- `PYTORCH_DEVICE: cuda # or cpu`
## Inputs
- image as 1920x1080xBGR array.
## Outputs
- Bounding box coordinates as well as the confidence and class label as output.
## Graph Description
```yaml
- id: yolov5
operator:
outputs:
- bbox
inputs:
image: webcam/image
python: ../../operators/yolov5_op.py
Graph Visualisation
flowchart TB oasis_agent subgraph yolov5 yolov5/op[op] end subgraph obstacle_location_op obstacle_location_op/op[op] end oasis_agent -- image --> yolov5/op yolov5/op -- bbox as obstacles_bbox --> obstacle_location_op/op
"""
import os from typing import Callable
import numpy as np import pyarrow as pa import torch from dora import DoraStatus
pa.array([]) # See: https://github.com/apache/arrow/issues/34994 IMAGE_WIDTH = 1920 IMAGE_HEIGHT = 1080 DEVICE = os.environ.get("PYTORCH_DEVICE") or "cpu" YOLOV5_PATH = os.environ.get("YOLOV5_PATH") YOLOV5_WEIGHT_PATH = os.environ.get("YOLOV5_WEIGHT_PATH")
class Operator:
"""
Send bbox found by YOLOv5 on given image
"""
def __init__(self):
if YOLOV5_PATH is None:
# With internet
self.model = torch.hub.load(
"ultralytics/yolov5",
"yolov5n",
)
else:
# Without internet
#
# To install:
# cd $DORA_HOME_DEP/dependecies # Optional
# git clone https://github.com/ultralytics/yolov5.git
# rm yolov5/.git -rf
# Add YOLOV5_PATH and YOLOV5_WEIGHT_PATH in your YAML graph
self.model = torch.hub.load(
YOLOV5_PATH,
"custom",
path=YOLOV5_WEIGHT_PATH,
source="local",
)
self.model.to(torch.device(DEVICE))
self.model.eval()
def on_event(
self,
dora_event: dict,
send_output: Callable[[str, bytes], None],
) -> DoraStatus:
if dora_event["type"] == "INPUT":
return self.on_input(dora_event, send_output)
return DoraStatus.CONTINUE
def on_input(
self,
dora_input: dict,
send_output: Callable[[str, bytes], None],
) -> DoraStatus:
"""
Handle image
Args:
dora_input["id"] (str): Id of the input declared in the yaml configuration
dora_input["value"] (arrow.array (UInt8)): Bytes message of the input
send_output (Callable[[str, bytes]]): Function enabling sending output back to dora.
"""
if dora_input["id"] == "image":
frame = (
dora_input["value"]
.to_numpy()
.reshape((IMAGE_HEIGHT, IMAGE_WIDTH, 4))
)
frame = frame[:, :, :3]
results = self.model(frame) # includes NMS
arrays = np.array(results.xyxy[0].cpu())[
:, [0, 2, 1, 3, 4, 5]
] # xyxy -> xxyy
arrays[:, 4] *= 100
arrays = arrays.astype(np.int32)
arrays = pa.array(arrays.ravel().view(np.uint8))
send_output("bbox", arrays, dora_input["metadata"])
return DoraStatus.CONTINUE
> Operators are composed of:
>
> `__init__` methods that help create the object.
>
> `on_event` methods that is called when an event is received.
> There is currently 4 event types:
> - `STOP`: meaning that the operator was signalled to stop.
> - `INPUT`: meannig that an input was received.
> - You can use `dora_event['id']`, to get the id.
> - You can use `dora_event['data']`, to get the data.
> - You can use `dora_event['meatadata']`, to get the metadata.
> - `INPUT_CLOSED`: meannig that an input source was closed. This could be useful if the input is critical for the well behaviour of the operator.
> - `ERROR`: meaning that error message was received.
> - `UNKNOWN`: meaning that an unknown message was received.
>
> We have encapsulated `input` event in a `on_input` method but this is not required.
To add an operator within the dataflow. You need to explicit what the input and output are. You can reference node by their ids:
```yaml
# graphs/tutorials/webcam_yolov5.yaml
nodes:
- id: webcam
operator:
python: ../../operators/webcam_op.py
inputs:
tick: dora/timer/millis/100
outputs:
- image
env:
DEVICE_INDEX: 0
- id: yolov5
operator:
outputs:
- bbox
inputs:
image: webcam/image
python: ../../operators/yolov5_op.py
- id: plot
operator:
python: ../../operators/plot.py
inputs:
image: webcam/image
obstacles_bbox: yolov5/bbox
In this case, we have connected the webcam/image output to the image input of yolov5. yolov5/bbox is then connected to the plot/obstacles_bbox.
Inputs are prefixed by the node name to be able to separate name conflicts.
To run:
dora up
dora start graphs/tutorials/webcam_yolov5.yaml --attach
For more information on
yolov5, go on ouryolov5detail page