PID Control operator
pid control operator computes the command that needs to be executed to follow the given waypoints.
It reacts to the car current speed and position in a way that accelerates or brake according to previous inputs.
Inputs
- waypoints coordinates to follow.
Outputs
- throttle, steering (rad) and braking.
Graph Description
- id: pid_control_op
operator:
python: ../../operators/pid_control_op.py
outputs:
- control
inputs:
position: oasis_agent/position
speed: oasis_agent/speed
waypoints: fot_op/waypoints
Graph Viz
flowchart TB oasis_agent subgraph fot_op fot_op/op[op] end subgraph pid_control_op pid_control_op/op[op] end oasis_agent -- position --> pid_control_op/op oasis_agent -- speed --> pid_control_op/op fot_op/op -- waypoints --> pid_control_op/op pid_control_op/op -- control --> oasis_agent
Hyperparameters consider changing
See: https://en.wikipedia.org/wiki/PID_controller
pid_p = 0.1
pid_d = 0.0
pid_i = 0.05
dt = 1.0 / 20
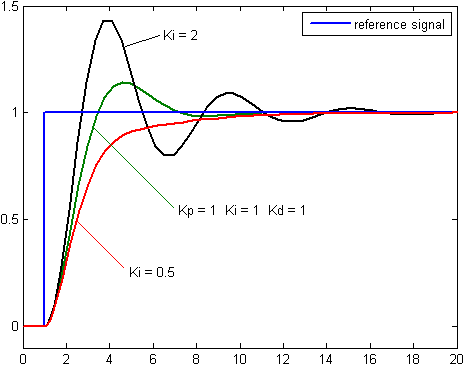
Example reaction: