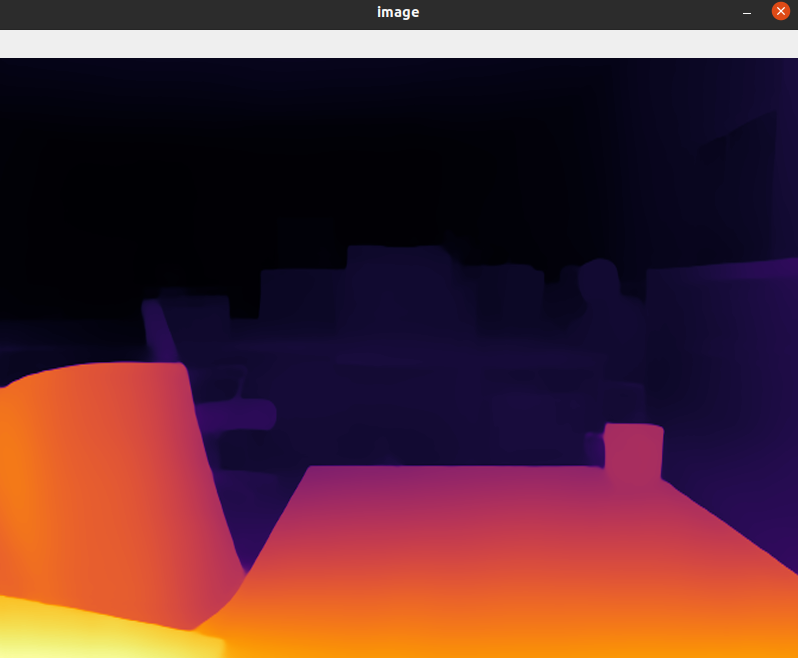
Depth estimation example
MiDaS models for computing relative depth from a single image.
MiDaS computes relative inverse depth from a single image. The repository provides multiple models that cover different use cases ranging from a small, high-speed model to a very large model that provide the highest accuracy. The models have been trained on 10 distinct datasets using multi-objective optimization to ensure high quality on a wide range of inputs. Let's add all
dora-drivesoperators that works on image frame, which are:
webcamplug in a camera.midas_opcomputing relative depth from a single image.plottake almost all output from the graph and plot it on the camera frame.
the graph will look as follows:
# graphs/tutorials/webcam_midas_frame.yaml
nodes:
- id: webcam
operator:
python: ../../operators/webcam_op.py
inputs:
tick: dora/timer/millis/100
outputs:
- image
env:
DEVICE_INDEX: 0
- id: midas_op
operator:
outputs:
- depth_frame
inputs:
image: webcam/image
python: ../../operators/midas_op.py
env:
PYTORCH_DEVICE: "cuda"
MIDAS_PATH: $DORA_DEP_HOME/dependencies/MiDaS/
MIDAS_WEIGHT_PATH: $DORA_DEP_HOME/dependencies/MiDaS/weights/midas_v21_small_256.pt
MODEL_TYPE: "MiDaS_small"
MODEL_NAME: "MiDaS_small"
- id: plot
operator:
python: ../../operators/plot.py
inputs:
image: midas_op/depth_frame
MiDaS source code:
You need to link the network to load the algorithm model. If you are in mainland China, you may need a network proxy to speed up the download.
optional: Of course, you can also download it in advance and place it under the specified directory. The operation steps are as follows:
cd $DORA_DEP_HOME/dependencies/
git clone git@github.com:isl-org/MiDaS.git
cd MiDaS/weights
# If you don't want to add manual download, the program will also automatically download the model file
wget https://github.com/isl-org/MiDaS/releases/download/v2_1/midas_v21_small_256.pt
cp midas_v21_small_256.pt $HOME/.cache/torch/hub/checkpoints/
At the same time, open the following comments in the dataflow configuration file # graphs/tutorials/webcam_midas_frame.yaml
MIDAS_PATH: $DORA_DEP_HOME/dependencies/MiDaS/
MIDAS_WEIGHT_PATH: $DORA_DEP_HOME/dependencies/MiDaS/weights/midas_v21_small_256.pt
MODEL_TYPE: "MiDaS_small"
MODEL_NAME: "MiDaS_small"
- model_type = "DPT_Large" # MiDaS v3 - Large (highest accuracy, slowest inference speed)
- model_type = "DPT_Hybrid" # MiDaS v3 - Hybrid (medium accuracy, medium inference speed)
- model_type = "MiDaS_small" # MiDaS v2.1 - Small (lowest accuracy, highest inference speed)
Custom configuration
-
Pick one or more models, You can find out more here.
-
Other descriptive information In this case, we have connected the
webcam/imageoutput to theimageinput of midas_op.midas_op/depth_frameis then connected to theplot/image. Inputs are prefixed by the node name to be able to separate name conflicts.
To run:
dora up
dora start graphs/tutorials/webcam_midas_frame.yaml --attach --hot-reload --name dpt_midas
Display as follows:
I'm currently having issue running all nodes behind the GFW. You can look into it for inspiration.
Nice 🥳 As you can see, the value of dora comes from the idea that you can compose different algorithm really quickly.