Yolov8
Making the video stream intelligent
Let's add a yolov8 object detection operator, that you can find as an example. This will help us detect object as bounding boxes within the webcam stream.
-
Install required dependencies
conda create -n example_env python=3.11
conda activate example_env
pip install -r https://raw.githubusercontent.com/dora-rs/dora/v0.3.6/examples/python-operator-dataflow/requirements.txt -
Create a new
object_detection.pypython file with the following contentwget https://raw.githubusercontent.com/dora-rs/dora/v0.3.6/examples/python-operator-dataflow/object_detection.pyobject_detection.py:#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import numpy as np
import pyarrow as pa
from dora import DoraStatus
from ultralytics import YOLO
pa.array([])
CAMERA_WIDTH = 640
CAMERA_HEIGHT = 480
class Operator:
def __init__(self):
self.model = YOLO("yolov8n.pt")
def on_event(
self,
dora_event,
send_output,
) -> DoraStatus:
if dora_event["type"] == "INPUT":
return self.on_input(dora_event, send_output)
return DoraStatus.CONTINUE
def on_input(
self,
dora_input,
send_output,
) -> DoraStatus:
frame = dora_input["value"].to_numpy().reshape((CAMERA_HEIGHT, CAMERA_WIDTH, 3))
frame = frame[:, :, ::-1] # OpenCV image (BGR to RGB)
results = self.model(frame) # includes NMS
# Process results
boxes = np.array(results[0].boxes.xyxy.cpu())
conf = np.array(results[0].boxes.conf.cpu())
label = np.array(results[0].boxes.cls.cpu())
# concatenate them together
arrays = np.concatenate((boxes, conf[:, None], label[:, None]), axis=1)
send_output("bbox", pa.array(arrays.ravel()), dora_input["metadata"])
return DoraStatus.CONTINUEOperators are composed of:
on_eventmethods is called when an event is received. There is currently 4 event types:STOP: meaning that the operator was signalled to stop.INPUT: meannig that an input was received.- You can use
dora_event['id'], to get the id. - You can use
dora_event['data'], to get the data as bytes. - You can use
dora_event['value'], to get the data as arrow array. - You can use
dora_event['metadata'], to get the metadata.
- You can use
INPUT_CLOSED: meannig that an input source was closed. This could be useful if the input is critical for the well behaviour of the operator.ERROR: meaning that error message was received.UNKNOWN: meaning that an unknown message was received.
-
Add an operator within the dataflow
wget https://raw.githubusercontent.com/dora-rs/dora/v0.3.6/examples/python-operator-dataflow/dataflow.yamldataflow.yaml:nodes:
- id: webcam
operator:
python: webcam.py
inputs:
tick: dora/timer/millis/100
outputs:
- image
- id: object_detection
operator:
python: object_detection.py
inputs:
image: webcam/image
outputs:
- bbox
- id: plot
operator:
python: plot.py
inputs:
image: webcam/image
bbox: object_detection/bboxIn this case, we have connected the
webcam/imageoutput to theimageinput of yolov8.object_detection/bboxis then connected to theplot/obstacles_bbox.Inputs are prefixed by the node name to be able to separate name conflicts.
-
run
dora up
dora start dataflow.yml --attach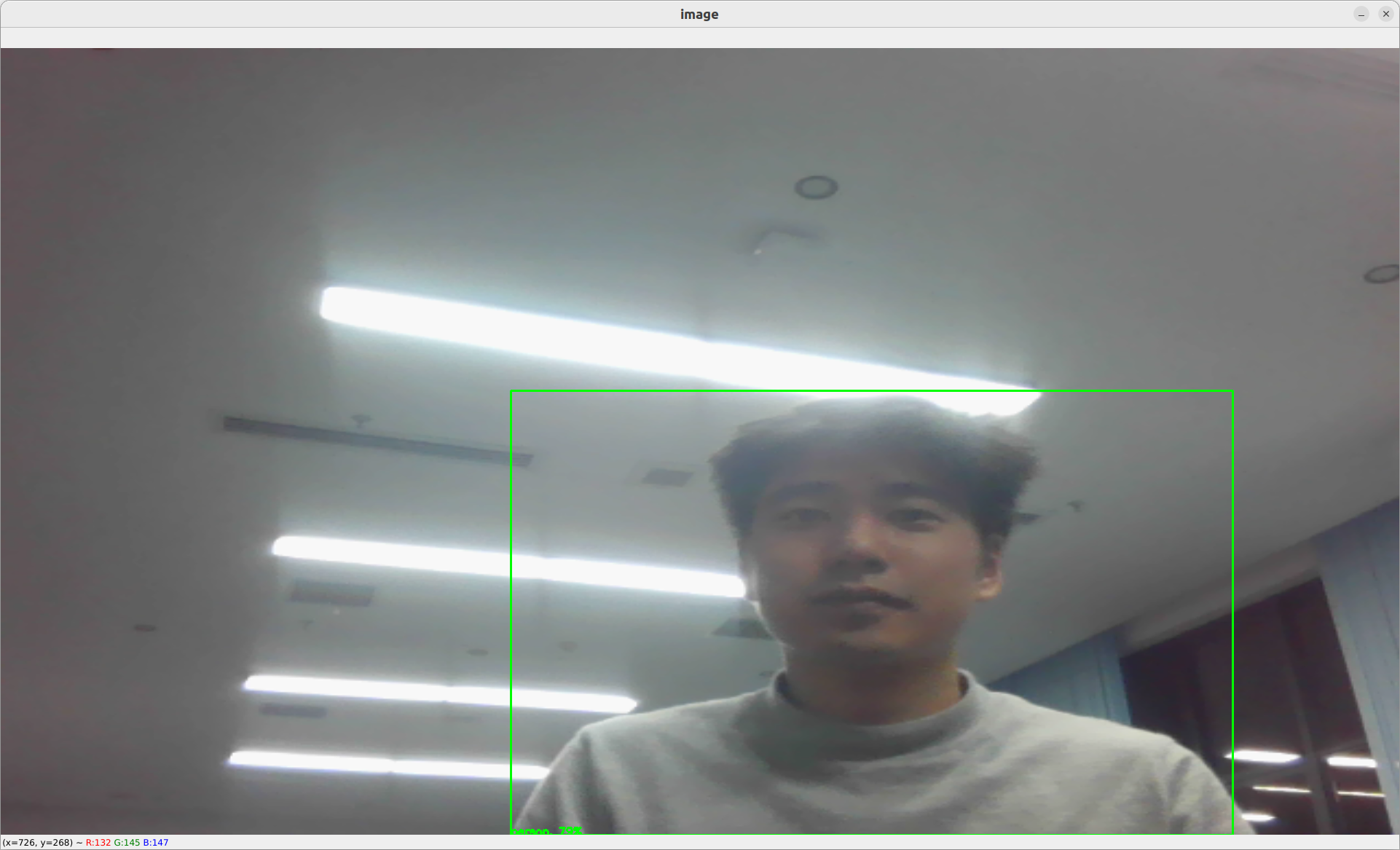
The plot will show object detected in the image as bounding box with a label and a confidence score.